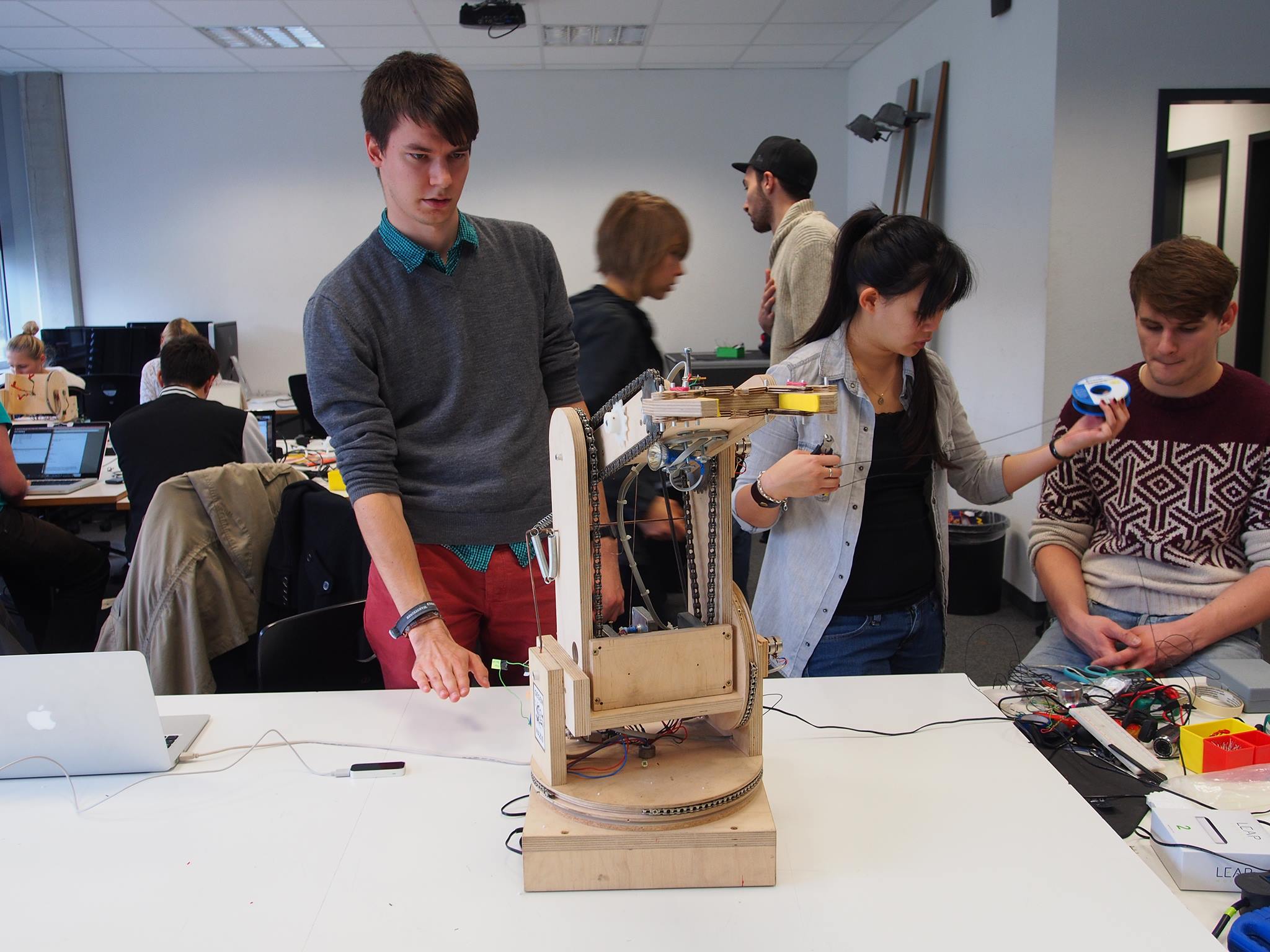






Bei diesem Projekt haben wir einen Roboter gebaut, der mit Gesten gesteuert werden kann. Dafür haben wir ein Arduino Board, eine Leap Motion und Processing eingesetzt. Wir haben intuitive Gesten verwendet mit denen man den Roboter einhändig steuern kann. Außerdem erkennt der Roboter seine aktuelle Position und ist somit in der Lage, Gegendruck zu leisten, wenn man versucht ihn von Hand zu verstellen oder er ohne weiteres Zutun umkippen würde.
Eine meiner Hauptaufgaben war es, die Anbindung der Leap Motion an die Robotersteuerung zu programmieren.